Nach einer Operation müssen die genutzten Instrumente wiederaufbereitet werden – ein Job, der monoton und mit einem gewissen Verletztungs- und Infektionsrisiko verbunden ist. Inwiefern eine weiche Roboterhand diese risikoreiche Aufgabe übernehmen kann, prüfen Prof. Dr.-Ing. Hannes Höppner (Fachbereich VII) und seine Mitarbeiter Steffen Puhlmann und Adrian Sieler. Im Projekt „SIRo-AEMP“ validieren sie die Ergebnisse ihrer langjährigen Forschung am Soft Interactive Robotics Laboratory (SIRo Lab), testen sie unter realitätsnahen Bedingungen – und ebnen den Weg für eine Ausgründung aus der BHT.
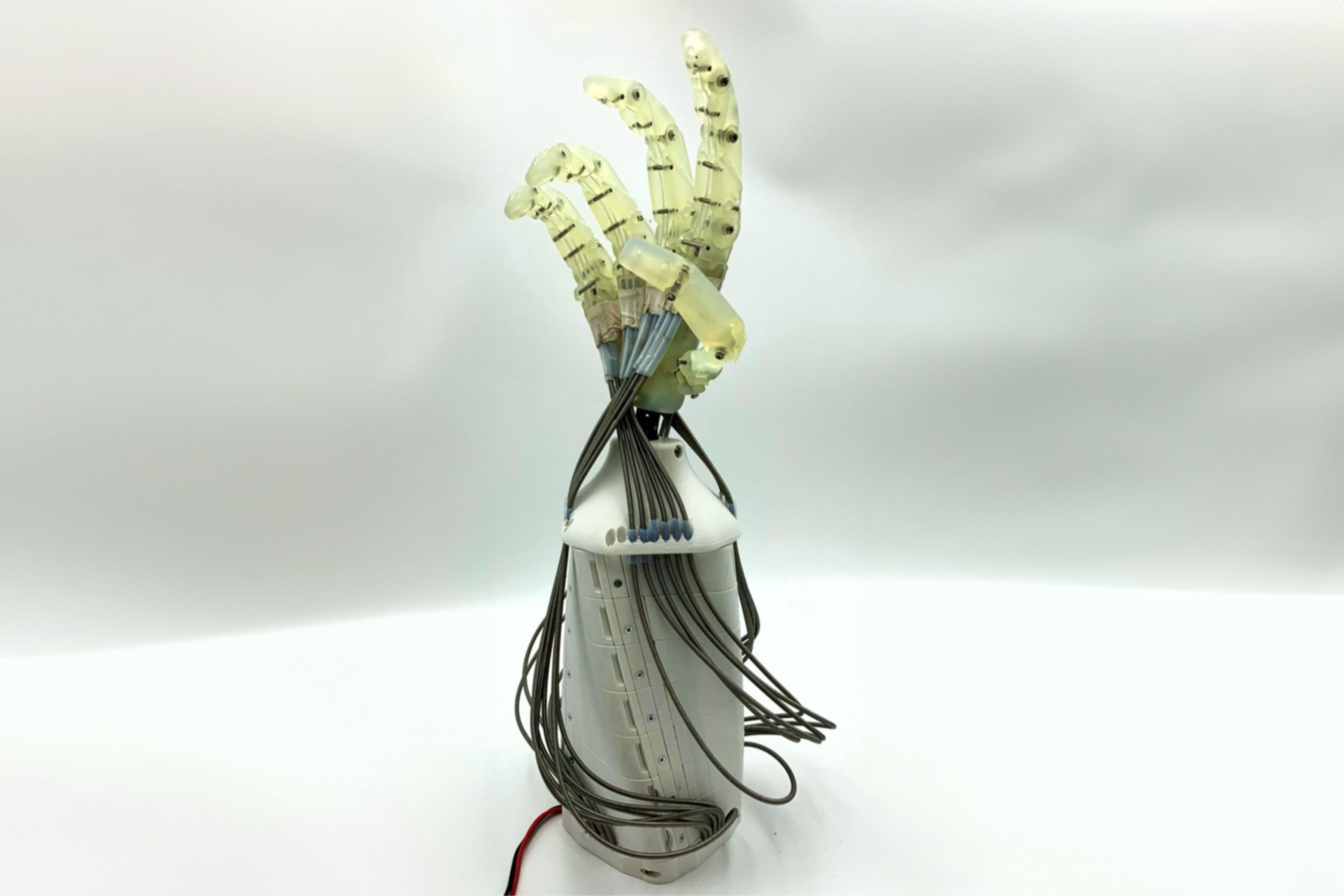
Die von ihnen entwickelte Roboterhand hat Finger, Daumen und ein bewegliches Handgelenk – ganz wie eine menschliche Hand. Verbunden mit einem Roboterarm und einer Kamera soll sie einzelne kontaminierte chirurgische Instrumente erkennen, prüfen und für die maschinelle Reinigung vorbereiten. Das heißt, sie aus den Siebschalen nehmen, Besteck wie Scheren und Spreizer öffnen und alles kontrolliert und sicher in jene Behälter legen, in denen sie sterilisiert werden. Die Herausforderung ist, auch mit ungeordneten und verhakten Instrumenten zu hantieren, sie trotz ihrer reflektierenden Oberfläche richtig zu erkennen und vorsichtig mit scharfen Spitzen und Kanten umzugehen.
Die robotische Lösung des BHT-Teams soll helfen, Mitarbeitende zu entlasten und Gesundheitsrisiken zu verringern. Kooperationspartner ist die enamentis GmbH; sie ist spezialisiert auf die Automatisierung von Sterilgutlogistik. Das Land Berlin fördert das Vorhaben aus dem „Programm zur Förderung der Validierung von Forschungsergebnissen (ProValid)“ mit insgesamt rund 140.000 Euro über einen Zeitraum von neun Monaten.