Autonomous Surgery
Wie KI-trainierte Roboter bei chirurgischen Eingriffen assistieren können
Operationen gehören zu den komplexesten Aufgaben der Medizin. Sie verlangen höchste Präzision, Erfahrung und durchgehende Aufmerksamkeit. Zwar werden Robotersysteme bereits zur Unterstützung eingesetzt, dabei aber vollständig von Chirurg*innen gesteuert. Um deren kognitive und motorische Belastung vwährend komplexer Operationen zu reduzieren, entwickeln Forschende von BHT und Charité diese Robotersysteme weiter. Im Forschungsprojekt entsteht einen Demonstrator, der ausgewählte operative Schritte autonom oder teilautonom ausführen kann. Dafür kombinieren die Forschenden Regelungstechnik und Reinforcement Learning. Anwendungsszenario sind organerhaltende Eingriffe bei Harnblasenkarzinomen.
Entscheidungshoheit liegt beim Menschen
Das Harnblasenkarzinom zählt zu den häufigsten Tumorerkrankungen in Deutschland. Minimal-invasive Verfahren wie die transurethrale Resektion sind etabliert, erfordern jedoch ein hohes Maß an Präzision, räumlicher Orientierung und klinischer Erfahrung. Das roboterbasierte Assistenzsystem soll nach dem Einführen des Endoskops durch die behandelnden Ärzt*innen die Harnblase autonom scannen, ein hochauflösendes 3D-Modell der inneren Blasenwand generieren und darauf aufbauend Bewegungsstrategien zur präzisen Tumorresektion und anschließenden Nahtführung ausführen. Als datengestützt gesteuertes Subsystem soll der Roboter also wiederholbare, zeitkritische und hochpräzise chirurgische Teilschritte eigenständig vornehmen. Grundlage ist der Human-in-the-Loop-Ansatz: Die Chirurg*innen entscheiden vollständig über Ablauf, Zeitpunkt und Art der Assistenz – das robotische Assistenzsystem ersetzt sie also nicht.
Training am Silikon-Modell
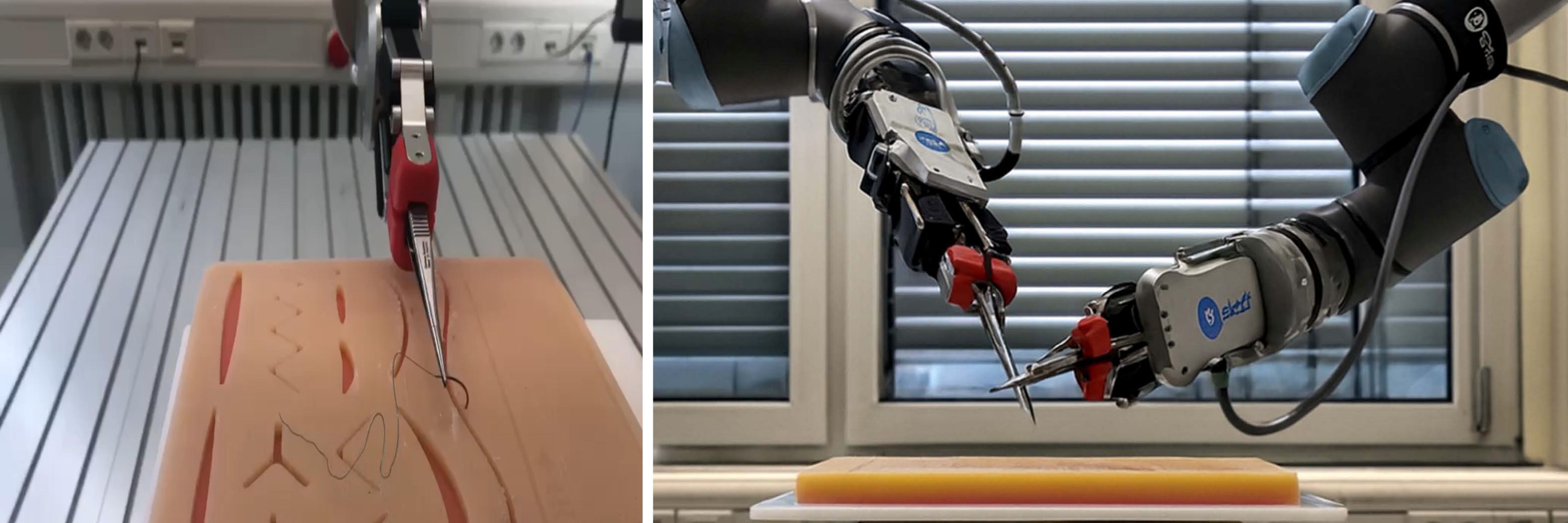
Noch arbeitet das Robotersystem nicht im Operationssaal, sondern entsteht als Demonstrator im Labor für Autonome Chirurgie an der BHT. Hier installierte das Projektteam die Systemarchitektur: Zwei Industrieroboter sind horizontal an einem verstärkten Metallrahmen montiert und über eine zentrale Steuerungsinstanz vernetzt. Diese Steuerungsinstanz koordiniert Bewegungsplanung, Kraftregelung und sensorbasierte Zustandsabschätzung. Eine hochauflösende zweidimensionale Kamera sowie drei dreidimensionale Kameras dienen der multimodalen Datenerfassung und Tiefenrekonstruktion. Ein Endoskop ergänzt die visuelle Sensorik.
Das Robotersystem ist nichtlinear, mehrdimensional und aufgrund von Werkzeug- und Gewebeinteraktionen nur schwer exakt modellierbar. Deshalb setzt das Forschungsteam zur autonomen Ausführung der chirurgischen Bewegungsabläufe das sogenannte Integral Reinforcement Learning (IRL) eint. IRL ist ein modellfreies Verfahren, das Regelstrategien ohne ein explizit bekanntes Systemmodell bestimmen kann. Es ermöglicht das Erlernen einer optimalen Trajektorien- und Kraftsteuerung direkt während des Experiments. Das ist vor allem im Hinblick auf die Eigenschaften von Gewebe zentral: Dadurch, dass es beweglich und verformbar ist, muss die KI ihre Entscheidungen und Bewegungen in Echtzeit an veränderte operative Bedingungen anpassen. Im Labor validieren die Forschenden die von ihnen entwickelten Algorithmen mithilfe eines anatomisch realistischen Harnblasenmodells aus Silikon.
Herausforderungen im Projekt liegen in der Entwicklung passender IRL-Algorithmen, in der Finanzierung der technischen Weiterentwicklung und organisatorischen Umsetzung sowie in der Anpassung chirurgischer Instrumente für den präzisen und sicheren robotischen Einsatz.
Projektleitung an der BHT
Prof. Dr.-Ing. Francisco Morales Serrano
Fachbereich VI – Informatik und Medien
Lab for Autonomous Surgery